韓国の大規模地下化道路工事で導入されたAIドローン自動管制とデジタルツインの事例を軸に、土木現場の生産性向上と安全管理の具体的な導入ステップを解説します。
はじめに:人手不足の土木現場をAIドローンでどう変えるか
2025年も終盤に差し掛かり、建設・土木業界では「人手不足」「安全管理の高度化」「生産性向上」が避けて通れないテーマになっています。特に大規模土木工事では、広大な現場を限られた人数で管理せざるを得ず、「目が届かない」「記録が追いつかない」という悩みを抱える現場も少なくありません。
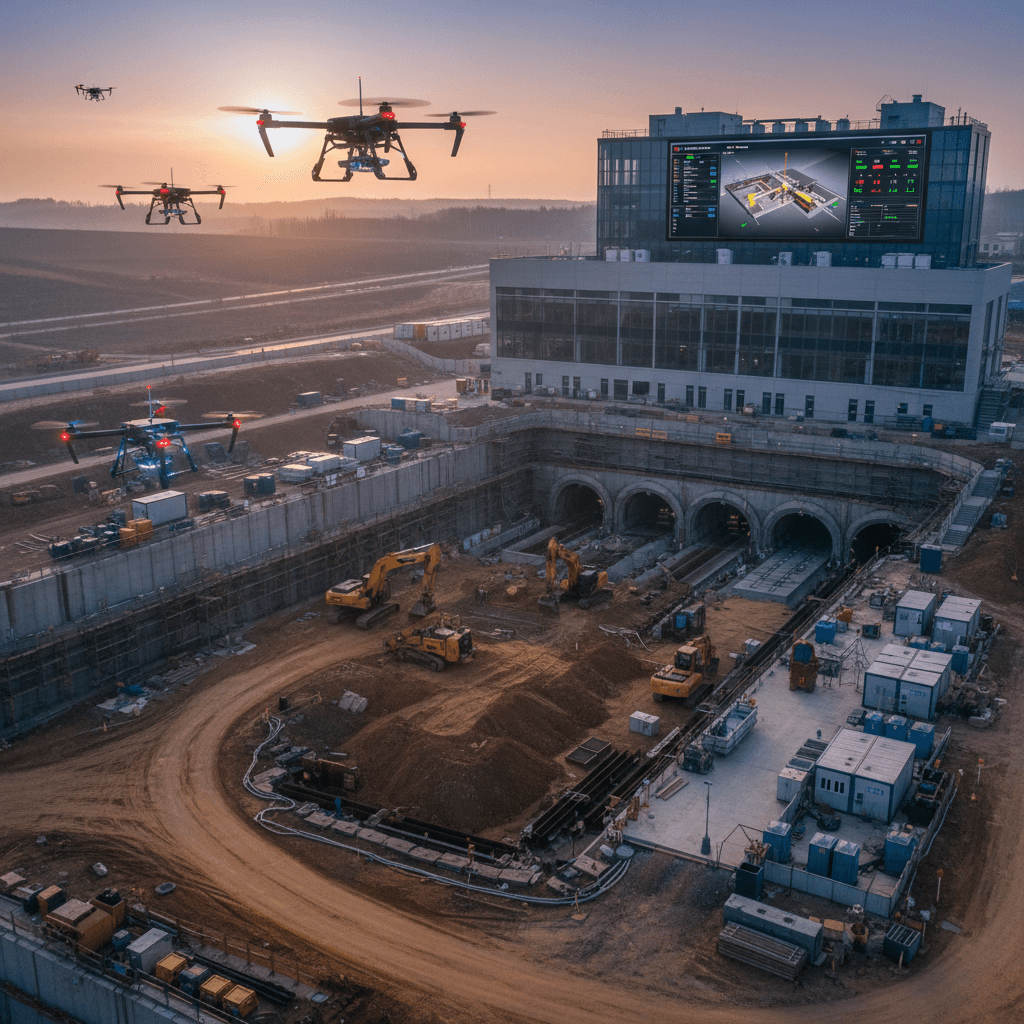
こうした中で、韓国の大手ゼネコン現代建設とドローンプラットフォーム企業エンジェルスウィングが、大規模地下化道路工事で自動管制ドローンとデジタルツインを組み合わせた施工・安全管理プラットフォームを導入した事例は、日本の建設会社にとっても非常に示唆に富んでいます。
本記事では、この韓国事例をベースにしながら、シリーズ「建設業界のAI導入ガイド:生産性向上と安全管理」の一環として、
- AI×ドローン自動管制が大規模土木現場にもたらすインパクト
- デジタルツインを活用した安全管理・品質管理の実践イメージ
- 日本の建設会社が、2026年を見据えて今から準備すべきステップ
を、現場での実装レベルに落とし込んで解説します。
韓国事例に見る「ドローン自動管制+デジタルツイン」の全体像
まずは、韓国・南楊州の大規模土木プロジェクトで何が行われているのかを整理します。ここを押さえることで、日本の現場への応用イメージが一気に具体的になります。
6.41km・事業費1兆ウォン規模の高難度プロジェクト
この案件は、「南楊州王宿 国道47号線移設(地下化)道路工事」という大規模プロジェクトです。
- 総延長:6.41km
- 事業費:約1兆503億ウォン(約1000億円規模)
- 特徴:上下線を完全に分離した「4分離立体トンネル」構造
- 地上道路と地下トンネルの工事が同時進行する高難度現場
日本でも高速道路の地下化や都市部のトンネル工事など、これに近い難度のプロジェクトは珍しくなく、「地上・地下が入り組んだ施工フェーズ」「重機・作業員・通行車両が混在する環境」は共通の課題と言えます。
自動ドローンステーションによる“毎日フライト”の仕組み
ここで導入されたのが、DJI Dock 3をベースにした自動離着陸・自動充電・自動飛行が可能なドローンステーションです。これにエンジェルスウィングのプラットフォームを組み合わせることで、次のような運用が実現されています。
- ドローンが毎日、決まった時間に自動で飛行
- 事前に設定したルートに沿って、現場全体を空撮
- 撮影データが自動でアップロード・解析され、
- 2Dオルソ画像
- 3Dデジタルツインモデル へと自動変換
この結果、人がドローンを操縦しなくても、現場の「最新の姿」が毎日デジタル化される状態が作られています。
AIとデジタルツインで何が見えるようになったのか
デジタルツイン化された現場データは、以下のような用途に使われています。
- 施工品質・出来形の確認
- 進捗管理(出来高の可視化)
- 高リスクエリアの抽出・監視
- トンネル・地下車道部の最適な施工順序や資機材配分の検討
- 本社と現場のコミュニケーション高度化(同じ3Dモデルを見ながら議論)
さらに、同社は国土交通省主催の「スマート建設チャレンジ」で革新賞を受賞したAI基盤のドローン安全管制技術を適用しており、今後はリアルタイムAIによる危険検知を強化する計画です。
「自動離着陸と日次データ収集をもとに、正確なデジタルツイン環境を提供し、国内最大級土木現場の安全・品質管理を高度化する」
という経営トップのコメントは、そのまま日本のゼネコン・中堅建設会社にも当てはまるメッセージでしょう。
AIドローン自動管制がもたらす3つのメリット
同様の仕組みを日本の土木現場に導入した場合、どのような効果が期待できるでしょうか。ここでは**「生産性」「安全性」「ガバナンス」**の3つの観点から整理します。
1. 生産性向上:測量・進捗確認を“自動化”する
従来、人が行っていた出来高測量や進捗確認は、以下のような課題を抱えていました。
- 測量・写真撮影に担当者の稼働が取られる
- 測量頻度が週1回・月1回にとどまり、変化をリアルタイムに追えない
- 手作業での帳票化・報告資料作成に時間がかかる
AIドローン自動管制とデジタルツインを組み合わせることで、これらは次のように変わります。
- 日次で自動飛行 → 最新データを常に保有
- 点群データや3Dモデルから、出来高を半自動で算出
- 進捗グラフやダッシュボードを自動生成し、現場会議で即活用
日本でも既に一部のゼネコンが「毎日ドローンで施工管理をDX化」する取り組みを始めていますが、手動操縦から「全自動管制」へ移行することで、本当に人手を空けるレベルの省力化が実現します。
2. 安全性向上:AI画像認識による“見張り番”の常駐
安全管理の観点では、AIによる画像認識が本領を発揮します。デジタルツインに紐づいたドローン映像をAIが解析することで、例えば次のような検知が可能です。
- 立入禁止エリアへの人の侵入
- 重機と作業員の接近・ニアミス
- 坑口周りの土砂の変状・崩落兆候
- 高所作業時の未墜落防止措置(親綱未使用など)の疑い
ポイントは、**「防犯カメラの死角を埋める」**ということです。地上固定カメラではどうしてもカバーしきれないエリアも、上空からのドローン映像で補完できます。
AI検知結果をもとに、
- 現場代理人のPC・タブレットにアラート表示
- 毎朝のKY・安全ミーティングで前日のヒヤリハット映像を共有
- 危険多発エリアをヒートマップ表示し、重点パトロールに活用
といった運用につなげれば、「感度の高い安全文化」をAIが後押ししてくれます。
3. ガバナンス強化:本社・発注者への説明責任を果たす
大規模プロジェクトほど、発注者や本社への報告・説明は重くなります。デジタルツインとAI分析を組み合わせることで、
- 「いつ・どこで・何が起きていたか」を時系列で再現
- 出来高や工程遅延の原因を、映像・3Dモデル付きで説明
- 追加工事や設計変更の妥当性を客観データで示す
ことが可能になります。
これは、**不具合発生時の責任追及を回避するための“守りのガバナンス”だけでなく、適切なリスクテイクを促す“攻めのガバナンス”**にもつながります。経営層や発注者が「現場のリアル」を共有できれば、チャレンジングな施工方法にも合意を得やすくなるからです。
日本の建設会社が導入を進めるための5ステップ
では、実際に日本のゼネコン・中堅建設会社が、AIドローン自動管制とデジタルツインを導入するにはどう進めればよいでしょうか。ここでは、無理なく始められる5つのステップに分解して解説します。
ステップ1:用途とKPIを明確にする
まずは、「何のために導入するのか」を明確にすることが重要です。代表的な用途は次の3つです。
- 進捗・出来高管理の高度化(生産性KPI)
- 危険源の可視化による災害防止(安全KPI)
- 本社・発注者とのコミュニケーション改善(ガバナンスKPI)
例えば、
- 「測量・出来高確認にかかる人件費を30%削減」
- 「重大災害ゼロを維持しつつ、ヒヤリハットを50%以上削減」
のように、具体的なKPIを2〜3個に絞って設定すると、ベンダーとの要件調整もしやすくなります。
ステップ2:試行現場の選定と“条件の見える化”
次に、PoC(試行導入)を行う現場を選びます。適した現場の条件としては、
- 敷地が比較的広く、地上・地下・高所が混在している
- 工期が1年以上あり、日次・週次の変化が大きい
- 会社として重点管理したい案件(社内的な注目度が高い)
などが挙げられます。
あわせて、
- 飛行制限・電波環境
- 近隣への騒音・プライバシー配慮
- 既存のICT施工・BIM/CIMの活用状況
といった**“前提条件”を整理しておくことが成功の鍵**になります。
ステップ3:ドローン自動管制とAI解析の組み合わせを設計
ドローンとAIは「セット」で設計する必要があります。
- 使用するドローン・ドック(自動離着陸ステーション)の選定
- 飛行ルート・飛行頻度・撮影条件の設計
- 解析プラットフォーム(クラウド or オンプレミス)の選定
- AI機能(物体検知、危険検知、出来形自動判定など)の優先順位決定
ここで重要なのは、いきなり理想のフルセットを目指さないことです。まずは、
- 自動飛行で2Dオルソ画像を日次取得
- 月数回、3Dモデル生成・進捗レビュー
- 並行して、AI危険検知の対象を1〜2項目に絞って試行
というように、段階的にAI活用の幅を広げていく方が、現場の受容性も高く、失敗したときのリカバリーも容易です。
ステップ4:BIM/CIM・工程管理との連携
シリーズ全体のテーマでもある「AI×BIM/CIM×工程管理」との連携は、中長期的に大きなリターンを生みます。
- 3Dデジタルツインを、CIMモデルと重ねて「計画 vs 実績」を可視化
- 工程表(ガントチャート)と出来高データを紐づけ、遅延リスクを早期検知
- 計画段階の施工シミュレーション結果と、実際の施工データを比較し、次案件の計画精度を向上
特に、熟練技術者の“勘どころ”をデジタルデータとして蓄積・継承できる点は、技能伝承の観点でも大きな意味があります。若手・中堅にとっても、「過去の優良事例を3Dで追体験できる」ことは、机上教育よりはるかに効果的です。
ステップ5:現場への定着とルール化
最後のハードルは、「仕組みを入れたあと、現場で使い続けてもらうこと」です。そのためには、
- 朝礼・安全ミーティングでの“標準議題”として、前日ドローンデータの確認を組み込む
- 施工会議の資料テンプレートに、デジタルツインのスクリーンショットを必須項目として入れる
- 安全表彰や社内アワードの評価項目に、AIドローンデータを活用した改善事例を追加
といった形で、現場ルール・評価制度に組み込むことがポイントです。
単なる「新しいガジェット」で終わらせず、組織文化とプロセスの一部として埋め込むことで、初めて投資対効果が最大化されます。
2026年に向けて:AIドローンは“特別な現場”から“当たり前の道具”へ
韓国のエンジェルスウィングは、国内外で既に500件以上の建設現場にプラットフォームを導入していると言われています。日本でも、国交省によるICT活用支援・自治体の補助制度が広がりつつあり、2026年頃には「AI×ドローン×デジタルツイン」が、特別なハイテク現場ではなく、メジャーな施工管理手段になっている可能性は高いでしょう。
本シリーズ「建設業界のAI導入ガイド:生産性向上と安全管理」では、今後も、
- 画像認識AIによる安全監視の具体例
- BIM/CIMとAIを組み合わせた工程最適化
- 技能継承を支えるデジタルツインの活用
など、現場で“明日から使える”レベルのノウハウや事例を取り上げていきます。
AIドローン自動管制は、その中核となる技術の一つです。まずは、
- 自社のどの現場で、どの課題に効きそうか
- どの部署・メンバーを巻き込めば小さく始められるか
を具体的にイメージしてみてください。
次の大型案件が始まる前、あるいは2026年度の受注戦略を検討する今こそ、「AIをどう使うか」を真剣に考える絶好のタイミングです。あなたの現場で、AIドローンとデジタルツインをどのように活かしますか?